3D SPIΒΡΖΔ’Ι«ς Τ
3D SPIΒΡΖΔ’Ι«ς Τ
÷ΎΥυ÷ή÷ΣΘ§ΥφΉ≈ΩΤΦΦΒΡΖΔ’ΙΘ§ΒγΉ”≤ζΤΖΉΑ≈δœρΉ≈ΗΏΟήΦ·Μ·ΓΔ–Γ–ΆΜ·―ίΫχΘ§‘Ϋά¥‘ΫΕύΒΡΒγΉ”…ζ≤ζ≥ß…ΧΈΣ±Θ÷Λ≤ζΤΖ÷ ΝΩΘ§ΒΦ»κΗς÷÷ΤΖΩΊΉ‘Ε·Μ·…η±ΗΘ§‘ΎSMT…ζ≤ζœΏΒΡΕύΗωΈΜ÷Ο―œΑ―ΤΖ÷ ΙΊΘ§»ΪΖΫΈΜΙήΩΊΓΘΗυΨί»Ϊ«ρ±μΟφΧυΉΑ–≠ΜαΒΡ±®ΗφΘ§Έ“Ο«Ω…“‘Ω¥ΒΫ‘ΎSMT…ζ≤ζΙΐ≥Χ÷–Θ§ΈΐΗύ”ΓΥΔœύΙΊΒΡ≤ΜΝΦ’ΦΒΫ70%Θ§”ΓΥΔΒΡΚΟΜΒΨωΕ®Ή≈SMTΙΛ“’÷ ΝΩΘ§ΡΩ«ΑΚή¥σ“Μ≤ΩΖ÷ΒΡΒγΉ”≥ß…Χ «≤…”ΟAOI‘ΎΧυΤ§ΚσΚΆΜΊΝς¬·ΚσΫχ––Φλ≤βΘ§”…”Ύ………“ρ¥Υ”–≤Μ…ΌΒγΉ”…ζ≤ζ≥ß…ΧΒΦ»κ3D SPIά¥―œΑ―÷ ΝΩΙΊΘ§Ρ«Ο¥3D SPI «»γΚΈΦλ≤βΗΏΕ»ΓΔ‘≠άμ « ≤Ο¥Θ§‘θΟ¥ΦΤΥψ≥ωά¥ΒΡΡΊ?Ϋ”œ¬ά¥“Μ“Μœρ¥σΦ“Ϋι…ήΓΘ
- ΓΓΓΓ3D SPIΦΛΙβ»ΐΫ«Ζ®
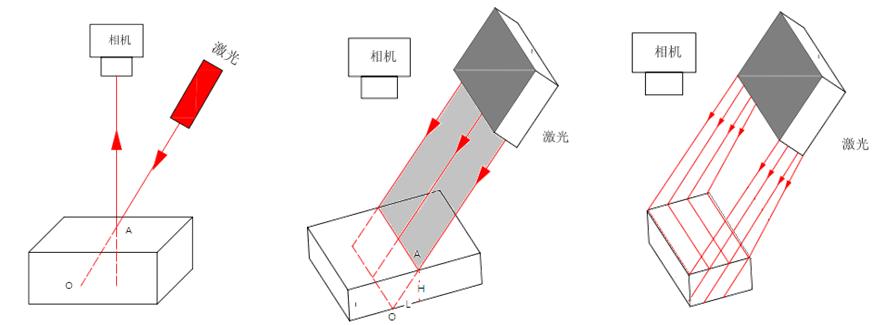
ΓΓΓΓ‘ΎΚή≥Λ“ΜΕΈ ±ΦδΡΎΘ§»ΥΟ«ΕΦ≤…”ΟΝΥ“Μ÷÷Φ»ΦρΒΞ“≤ «Β± ±Κή”––ßΒΡ“Μ÷÷ΖΫ Ϋά¥ΦΤΥψΗΏΕ»Θ§’β÷÷ΖΫ ΫΒΡΟϊ≥ΤΫ–Ήω“ΦΛΙβ»ΐΫ«Ζ®”Θ§Ρ«Ο¥ΦΛΙβ»ΐΫ«Ζ® «ΗυΨί ≤Ο¥―υΒΡ‘≠άμά¥ΦΤΥψΗΏΕ»ΒΡΡΊ?»γΆΦΥυ ΨΘΚCCDœύΜζ‘ΎΕΞ≤ΩΘ§ΦΛΙβ¥”≤ύΟφΆΕ…δ≥ωά¥Θ§÷±Ϋ”’’…δΒΫ¥ΐ≤βΈΜ÷ΟΒΡΚΗ≈Χ…œΉςΈΣΜυΉΦΒψΘ§Έ“Ο«”ΟOά¥±μ ΨΘ§Β±”–ΚΗΗύΒΡ ±Κρ’’…δœ¬ά¥ΒΡΦΛΙβΒψΨΆΜα±ΜΫΊΕœΘ§’’ΒΫΝμ“ΜΗωΈΜ÷ΟΘ§’βΗωΈΜ÷ΟΈ“Ο«Ϋ–Ήω≥…œώΒψΘ§”ΟAά¥±μ ΨΘ§ ‘ΌΆ®Ιΐ»ΐΫ«–ΈΙΊœΒH=tan*AO
ΓΓΓΓ«ΑΟφΥυΫ≤ΒΡΖΫΖ®÷ΜΡή≤βΝΩ“ΜΗωΒψΒΡΗΏΕ»Θ§ΈΣΝΥΧαΗΏ≤β ‘ΥΌΕ»Θ§»ΥΟ«÷πΫΞ≤…”ΟΝΥœΏΦΛΙβΓΔΟφΦΛΙβ(»γœ¬ΆΦΥυ Ψ)ΘΚ
ΓΓΓΓœΏΦΛΙβ“Μ¥ΈΩ…≤βΝΩ“ΜΧθΦΛΙβœΏ…œΒΡΥυ”–ΒψΘ§ΕχΟφΦΛΙβ“ρΈΣ≤…”ΟΕύΧθΦΛΙβœΏΘ§“Μ¥ΈΩ…“‘≤βΝΩ’ϊΗωFOVΒΡΕύΒψΗΏΕ»Θ§–߬ ΒΟΒΫΦΪ¥σΒΡΧα…ΐΓΘ
- ΓΓΓΓ3D SPIΕύœΏ(Οφ)ΦΛΙβΒΡ‘≠άμΘΚ
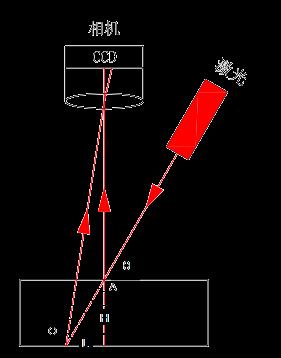
ΓΓΓΓ»γΆΦΥυ ΨΘ§Έ“Ο«“Σ≤βΝΩAΒψΒΡΗΏΕ»Θ§±Ί–κ“Σ÷ΣΒάAΒψΒΡ≤Έ’’ΒψΘ§“≤ΨΆ «–η“Σ»ΖΕ® «”…Ρ« χΦΛΙβΥυ’’ΝΝΘ§‘ΎΗΟΆΦ÷–Θ§»ΐΧθΦΛΙβœΏΒΡΜυΉΦΒψΖ÷±πΈΣO1\O2\O3Θ§œ‘»ΜΘ§AΒψ «”…ΒΎ»ΐ χΦΛΙβΥυ’’ΝΝΘ§‘Ύ’βάοΈ“Ο«Α―ΒΎ»ΐ χΦΛΙβΒΡΈΜ÷Ο≥Τ÷°ΈΣΙβ’’ΒψBΘ§ΫαΚœ«ΑΟφΥυΫ≤ΒΡΦΛΙβ»ΐΫ«Ζ®Θ§»ΖΕ®ΝΥΙβ’’ΒψBΓΔ“≤ΨΆ»ΖΕ®ΝΥΜυΉΦΒψOΘ§ΨΆΩ…“‘ΒΟΒΫAΒψΗΏΕ»
ΓΓΓΓΟφΦΛΙβΒΡ”≈»±ΒψΘΚ
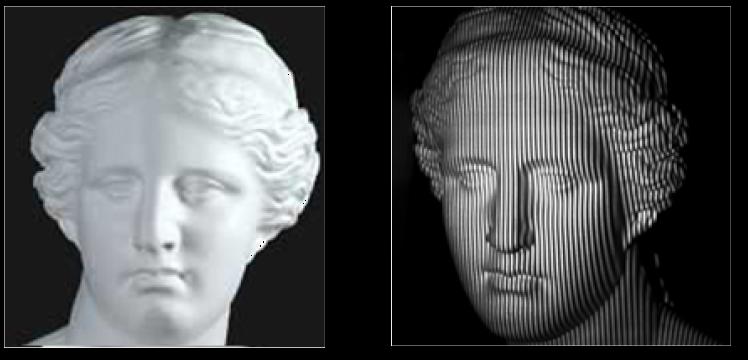
ΓΓΓΓ1ΓΔ”≈Βψ( ·ΗύΆΦ)Θ§ Ψ“βΆΦ «“ΜΗ± ·ΗύΆΦΘ§ΆΕ»κ“Μ χΟφΦΛΙβΘ§≈Ρ…ψ“Μ¥ΈΨΆΩ…“‘ΒΟΒΫ’ϊΖυΆΦœώΒΡ3D–≈œΔΘ§Εχ«“Έ“Ο«»β―έΩ…“‘¥”ΗΟΆΦΩ¥≥ωΘ§’β–©ΦΛΙβœΏΥφΉ≈ΈοΧεΒΡΗΏΕ»‘ΎΖΔ…ζΉσ”“ΤΪ“ΤΓΘΑ¥’’»Υ―έΒΡΨ≠―ιΘ§Μυ±ΨΨΆΩ…“‘≈–Εœ≥ωΈΣ3D–ΈΉ¥ΓΘ
ΓΓΓΓ2ΓΔ»±ΒψΘΚ»γΆΦΥυ Ψ:ΟφΦΛΙβΥυ’’ΝΝΒΡΈΜ÷ΟΈΣάκ…ΔΒψΘ§Ψχ¥σΕύ ΐΈΜ÷Ο «ΦΛΙβΈ¥’’…δΒΫΒΡΘ§“≤ΨΆ «ΥΒΘ§Έ“Ο«÷ΜΡήΙΜΨΪ»ΖΒΡΦΤΥψΦΛΙβ’’ΝΝΒΡΒψΘ§ΕχΨχ¥σΕύ ΐΒΡΒψ÷ΜΡήΆ®ΙΐΡβΚœΙάΥψ≥ωά¥Θ§÷±Ϋ””ΑœλΝΥ≤βΝΩΨΪΕ»ΓΘ
ΓΓΓΓΤδ¥ΈΘ§“ρΈΣΈοΧε±μΟφ±Ψ…μΒΡ―’…Ϊ“‘ΦΑΖ¥ΙβΒΡ”ΑœλΘ§Έ“Ο«‘Ύ Ε±π≥…œώΒψAΒΡ ±ΚρΘ§»ί“Ή≤ζ…ζΫœ¥σΒΡΈσ≤νΘ§Υυ“‘Θ§ Ι”Ο’β÷÷ΖΫΖ® ±Ά®≥Θ–η“ΣΕ‘±Μ≤βΈοΧεΫχ––≈γ…Α¥ΠάμΘ§≥…ΈΣΑΉ…Ϊ―«Ιβ±μΟφΓΘœ‘»ΜΘ§‘ΎSMT…ζ≤ζΙΐ≥Χ÷– «≤Μ»ί–μΒΡΓΘ
ΓΓ
ΓΓΓΓΡ«Ο¥Θ§ «Ζώ”–“Μ÷÷ΧΊ βΙβ‘¥Φ»ΡήΙΜΗ≤Η«±Μ≤βΈοΧεΒΡΥυ”–ΒψΘ§Εχ«“”÷ΡήΖΫ±ψΈ“Ο«»ΖΕ®ΟΩΗω≥…œώΒψAΥυΕ‘”ΠΒΡΙβ’’ΒψBΓΘ
ΓΓΓΓ¥πΑΗ «ΘΚ”–!Έ“Ο«œ¬ΟφΜα≤ϊ ω“Μ÷÷–¬ΒΡ’’ΟςΖΫ Ϋ-------’ΐœ“’’ΟςΓΘ
- ΓΓΓΓ3D SPI’ΐœ“’’ΟςΒΡΧΊ–‘ΘΚ
ΓΓΓΓ’ΐœ“’’Ος «“Μ÷÷ΆΕ”Α’’ΟςΘ§Υϋ’’…δΒΫ“ΜΗωΤΫΟφΈοΧε ±Θ§Μα≥ œ÷ΟςΑΒΫΜΧφΒΡΙφ‘ρ±δΜ·
ΓΓΓΓ’βΗωΆΕ”ΑΆΦΑΗΒΡΝΝΕ» «≥ œ÷ΝΥ’ΐœ“«ζœΏΧΊ–‘Θ§»γΆΦ(’ΐœ“«ζœΏΆΦ)Θ§«κ¥σΦ“ΧΊ±πΉΔ“βΘΚ’ΐœ“«ζœΏ…œΒΡΟΩ“ΜΗωœύΈΜFiΕ‘”ΠΉ≈Έ®“ΜΒΡ“ΜΗωΙβ’’ΒψB
ΓΓΓΓ’ΐœ“Ιβ’’ΡΘ–ΆΘΚ
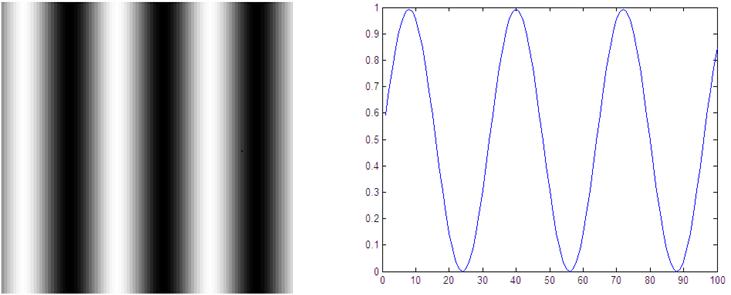
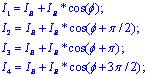
ΓΓΓΓ¥σΦ“ΥυΩ¥ΒΫΒΡ «’ΐœ“ΆΦΑΗΆΕ…δΒΫΈοΧε…œΒΡ’’ΟςΡΘ–ΆΘ§Φχ”Ύ ±ΦδΙΊœΒΘ§ΆΤΒΦΙΐ≥ΧΨΆ≤ΜΕύΫ≤Θ§ΒΪ «Θ§œΘΆϊ¥σΦ“Φ«ΉΓΫαΙϊΘΚI=Ib(ΜΖΨ≥ΝΝΕ»)+Ir*cosFiΘ§‘Ύ’βάοIb «±≥ΨΑΝΝΕ»Θ§IR «Ζ¥…δΝΝΕ»Θ§ΥϋΗζΈοΧεœύΙΊΘ§ΟΩ“ΜΒψΒΡIbΓΔIrΕΦ≤Μ“Μ―υΘ§Εχ«“ «Έ¥÷ΣΒΡΓΘ
ΓΓΓΓFi «’ΐœ“«ζœΏΒΡœύΈΜΘ§»γ«ΑΥυ ωΘ§Fi ΒΦ …œΕ‘”ΠΝΥΙβ’’ΒψBΘ§»γΙϊΈ“Ο«»ΖΕ®ΝΥFiΘ§“≤ΨΆΒΟΒΫΝΥΙβ’’ΒψBΘ§ΒΟΒΫΙβ’’ΒψBΨΆΩ…“‘Ά®Ιΐ»ΐΫ«Ζ®ΒΟΒΫΗΟΒψΒΡΗΏΕ»ΓΘ
ΓΓΓΓ»γΚΈ»ΖΕ®Fi?
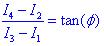
ΓΓΓΓ¥”ΗΟ ΫΉ”Ω…“‘Ω¥≥ωΘΚIBΓΔIR“‘ΦΑFi «Έ¥÷ΣΒΡΘ§ΒΪ «IbΓΔIrΈ“Ο«≤ΜΙΊ–ΡΘ§Έ“Ο«ΙΊ–ΡΒΡ «FiΘ§»γΚΈ«σΒΟFiΡΊ?”–―ß’ΏΧα≥ωΝΥ“ΤœύΖ®Θ§ΫβΨω’βΗωΈ ΧβΘ§ ≤Ο¥ «“ΤœύΖ®?
ΓΓΓΓ‘Ύœ¬ΆΦ÷–Θ§≈ΡΆξΒΎ“ΜΖυΆΦΚσΘ§“ΤΕ·’’ΟςΆΦΑΗpi\2Θ§≈Ρ…ψΒΎΕΰΖυΆΦΑΗΘ§‘Ό“ΤΕ·pi\2Θ§≈Ρ…ψΒΎ»ΐΖυΆΦœώΘ§‘Ό“ΤΕ·pi\2Θ§≈Ρ…ψΒΎΥΡΖυΆΦœώΘ§Ρ«Ο¥ΟΩΗωΒψΨΆΒΟΒΫΝΥΥΡΗωΝΝΕ»Θ§ΗυΨί«ΑΟφΒΡΙβ’’ΡΘ–ΆΘ§’βΥΡΗωΝΝΕ»ΒΡΙΪ Ϋ»γœ¬
ΓΓΓΓ…œ ωΥΡΗωΙΪ ΫΨ≠ΙΐΦρΒΞΒΡ ΐ―ß±δΜΜΘ§ΨΆΩ…“‘ΒΟΒΫ
ΓΓΓΓΗΟΆΦΦ¥ «ΥΡ≤Ϋ“ΤœύΖ®ΒΡ ΒάΐΘ§…œΟφΥΡΖυΆΦ «ΥΡ¥Έ“ΤΕ·≈Ρ…ψΒΡΆΦΑΗΘ§œ¬ΟφΒΡ3DΆΦ «ΗυΨίΈ“Ο««ΑΟφΥυΫ≤ΒΡΙΪ ΫΘ§Α―ΟΩΗωœώΥΊΒΡΗΏΕ»ΕΦΦΤΥψ≥ωά¥ΒΡΫαΙϊΓΘ
- ΓΓΓΓPMPΘΚ
ΓΓΓΓΈ“Ο««ΑΟφΥυΫ≤ΒΡ’ΐœ“ΆΦΑΗ“‘ΦΑ“ΤœύΖ®’β“Μ’ϊΧΉΫβΨωΖΫΑΗΫ–ΉωΘΚœύΈΜ≤βΝΩ¬÷άΣ θ(Phase Measurement Profilometry),Φρ≥ΤΈΣPMPΓΘ

 έ«ΑΖΰΈώ
έ«ΑΖΰΈώ έΚσΖΰΈώ
έΚσΖΰΈώ ΖΒΜΊΕΞ≤Ω
ΖΒΜΊΕΞ≤Ω