AleaderAOI检测仪-Match2算法
Aleader算法详解——Match2算法
Match2算法,是Match算法的延伸,是神州视觉AOI 20多种检测算法中一种特殊的算法,主要用于检测本体是否偏移。
Match2算法可分为基于基板的定位方式和非基板的定位方式。其中基于基板的定位方式是一种双定位方式,如下图:
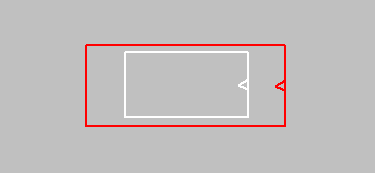
上图中红色框是基于基板的定位框,白色框是基于本体的定位,而基于本体的定位方式在基于基板的定位基础上,在限定的搜索范围内搜索最优定位点。根据两个定位框的相对偏移,计算其相对偏移值,作为真实偏移值。其偏移值的计算示意图如下:
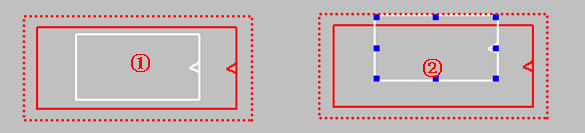
上图中①为标准示意图,②为待测偏移示意图。如①区域中基板定位框的中心点坐标为(X, Y),本体定位框的中心点坐标为(X1, Y1)。则标准相对偏移为(DDx, DDy),则计算公式如下:
DDx = X1 – X
DDy = Y1 – Y
当待测本体定位框偏离待测基本定位框(DDx, DDy)时,则实际偏移为(0, 0)。B区域中基板定位框的中心点坐标为(XX, YY),本体定位框的中心点坐标为(XX1, YY1)。则标准相对偏移为(DDx1, DDy1),则计算公式如下:
DDx1 = XX1 – XX
DDy1 = YY1 – YY
则待测元件的实际偏移为(Dx, Dy),计算公式如下:
Dx = DDx1 – DDx
Dy = DDy1 – DDy
通过判断(Dx,Dy)的范围来确定元件是否发生偏移。
Match2算法中基于本体框的定位模式有两种,分为为单框定位模式和双框组合定位模式。如下:
上图中①为单框定位模式,与Match算法一致;②为双框组合定位模式,定位区域由B区域中的实线单框和虚线单框组合而成,两个框的组合区域为有效定位区域。

 售前服务
售前服务 售后服务
售后服务 返回顶部
返回顶部